#include "PlatformIOImp.hpp"#include <string.h>#include <sys/types.h>#include <algorithm>#include <cmath>#include <iostream>#include <tuple>#include <memory>#include "geopm/Agg.hpp"#include "geopm/Exception.hpp"#include "geopm/Helper.hpp"#include "geopm/IOGroup.hpp"#include "geopm/PlatformTopo.hpp"#include "geopm_pio.h"#include "BatchServer.hpp"#include "CombinedControl.hpp"#include "CombinedSignal.hpp"#include "ServiceIOGroup.hpp"#include "BatchStatus.hpp"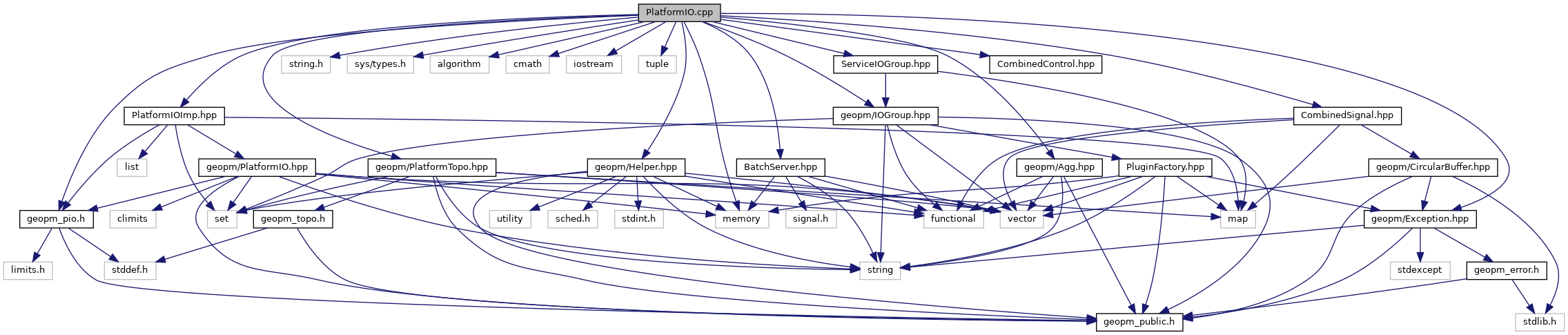
Namespaces | |
| namespace | geopm |
Functions | |
| PlatformIO & | geopm::platform_io (void) |
| int | geopm_pio_num_signal_name (void) |
| int | geopm_pio_signal_name (int name_idx, size_t result_max, char *result) |
| int | geopm_pio_num_control_name (void) |
| int | geopm_pio_control_name (int name_idx, size_t result_max, char *result) |
| int | geopm_pio_signal_domain_type (const char *signal_name) |
| Query the domain for the signal with name signal_name. | |
| int | geopm_pio_control_domain_type (const char *control_name) |
| Query the domain for the control with name control_name. | |
| int | geopm_pio_read_signal (const char *signal_name, int domain_type, int domain_idx, double *result) |
| Read from the platform and interpret into SI units a signal associated with signal_name and store the value in result. This value is read from the geopm_topo_e domain_type domain indexed by domain_idx. | |
| int | geopm_pio_write_control (const char *control_name, int domain_type, int domain_idx, double setting) |
| Interpret the setting in SI units associated with control_name and write it to the platform. This value is written to the geopm_topo_e domain_type domain indexed by domain_idx. | |
| int | geopm_pio_push_signal (const char *signal_name, int domain_type, int domain_idx) |
| Push a signal onto the stack of batch access signals. The signal is defined by selecting a signal_name from one of the values returned by the geopm_pio_signal_name() function, the domain_type from one of the geopm_domain_e values, and the domain_idx between zero to the value returned by geopm_topo_num_domain(domain_type). | |
| int | geopm_pio_push_control (const char *control_name, int domain_type, int domain_idx) |
| Push a control onto the stack of batch access controls. The control is defined by selecting a control_name from one of the values returned by the geopm_pio_control_name() function, the domain_type from one of the geopm_domain_e values, and the domain_idx between zero to the value returned by geopm_topo_num_domain(domain_type). | |
| int | geopm_pio_sample (int signal_idx, double *result) |
| Samples cached value of a single signal that has been pushed via geopm_pio_push_signal() and writes the value into result. | |
| int | geopm_pio_adjust (int control_idx, double setting) |
| Updates cached value for single control that has been pushed via geopm_pio_push_control() to the value setting. | |
| int | geopm_pio_read_batch (void) |
| Read all push signals from the platform so that the next call to geopm_pio_sample() will reflect the updated data. | |
| int | geopm_pio_write_batch (void) |
| Write all pushed controls so that values provided to geopm_pio_adjust() are written to the platform. | |
| int | geopm_pio_save_control (void) |
| Save the state of all controls so that any subsequent changes made through geopm_pio_write_control() or geopm_pio_write_batch() may be reverted with a call to geopm_pio_restore_control(). | |
| int | geopm_pio_restore_control (void) |
| Restore the state recorded by the last call to geopm_pio_save_control() so that all subsequent changes made through geopm_pio_write_control or geopm_pio_write_batch() are reverted to their previous settings. | |
| int | geopm_pio_save_control_dir (const char *save_dir) |
| Save the state of all controls in the directory so that any subsequent changes made through geopm_pio_write_control() or geopm_pio_write_batch() may be reverted with a call to geopm_pio_restore_control(). | |
| int | geopm_pio_restore_control_dir (const char *save_dir) |
| Restore the state recorded by the last call to geopm_pio_save_control() in the directory so that all subsequent changes made through geopm_pio_write_control or geopm_pio_write_batch() are reverted to their previous settings. | |
| int | geopm_pio_signal_description (const char *signal_name, size_t description_max, char *description) |
| int | geopm_pio_control_description (const char *control_name, size_t description_max, char *description) |
| int | geopm_pio_signal_info (const char *signal_name, int *aggregation_type, int *format_type, int *behavior_type) |
| C interface to get enums associated with a signal name. | |
| int | geopm_pio_start_batch_server (int client_pid, int num_signal, const struct geopm_request_s *signal_config, int num_control, const struct geopm_request_s *control_config, int *server_pid, int key_size, char *server_key) |
| Creates a batch server with the following signals and controls. It would be an error to create a batch server without any signals or controls. | |
| int | geopm_pio_stop_batch_server (int server_pid) |
| Supports the D-Bus interface for stopping a batch server. Call through to BatchServer::stop_batch() | |
| int | geopm_pio_format_signal (double signal, int format_type, size_t result_max, char *result) |
| Format the signal according to the format type specified, and write the output into the result string. | |
| void | geopm_pio_reset (void) |
| Reset the GEOPM platform interface causing resources to be freed. This will cause the internal PlatormIO instance to be released/deleted and reconstructed. As a result, any signals and controls that had been pushed will be cleared, any batch servers that had been started will be stopped, and all registered IOGroups will be reset. | |
| int | geopm_pio_check_valid_value (double value) |
Function Documentation
◆ geopm_pio_adjust()
| int geopm_pio_adjust | ( | int | control_idx, |
| double | setting | ||
| ) |
Updates cached value for single control that has been pushed via geopm_pio_push_control() to the value setting.
The cached value will be written to the platform at time of call to geopm_pio_write_batch().
- Parameters
-
[in] control_idx The control_idx provided matches the return value from geopm_pio_push_control() when the control was pushed. [in] setting The value of the control that is being pushed.
- Returns
- If an error occurs then negative error code is returned. Zero is returned upon success.
◆ geopm_pio_check_valid_value()
| int geopm_pio_check_valid_value | ( | double | value | ) |
- Parameters
-
[in] value Check if the given parameter is a valid value.
- Returns
- 0 if the value is valid, GEOPM_ERROR_INVALID if the value is invalid.
◆ geopm_pio_control_description()
| int geopm_pio_control_description | ( | const char * | control_name, |
| size_t | description_max, | ||
| char * | description | ||
| ) |
- Parameters
-
[in] control_name A string holding the name of the control. [in] description_max At most description_max bytes are written to the description string. If description_max is too small to contain the description an error will occur. [out] description Sets the description string to the control description associated with control_name. Providing a string of GEOPM_NAME_MAX length will be sufficient for storing any description.
- Returns
- Zero is returned on success and a negative error code is returned if any error occurs.
◆ geopm_pio_control_domain_type()
| int geopm_pio_control_domain_type | ( | const char * | control_name | ) |
Query the domain for the control with name control_name.
- Parameters
-
[in] control_name A string holding the name of the control.
- Returns
- one of the geopm_domain_e values signifying the granularity at which the control is measured. Will return a negative error code if any error occurs, e.g. a request for a control_name that is not supported by the platform.
◆ geopm_pio_control_name()
| int geopm_pio_control_name | ( | int | name_index, |
| size_t | result_max, | ||
| char * | result | ||
| ) |
- Parameters
-
[in] name_idx The value of name_idx must be greater than zero and less than the return value from geopm_pio_num_control_name() or else an error will occur. [in] result_max At most result_max bytes are written to the result string. If result_max is too small to contain the control name an error will occur. [out] result Sets the result string to the name of the control indexed by name_idx. Providing a string of GEOPM_NAME_MAX length will be sufficient for storing any result.
- Returns
- Zero is returned on success and a negative error code is returned if any error occurs.
◆ geopm_pio_format_signal()
| int geopm_pio_format_signal | ( | double | signal, |
| int | format_type, | ||
| size_t | result_max, | ||
| char * | result | ||
| ) |
Format the signal according to the format type specified, and write the output into the result string.
- Parameters
-
[in] signal The signal to be formatted. [in] format_type The format type is a string_format_e enumerated value. [in] result_max At most result_max bytes are written to the result string. If result_max is too small to contain the written output string an error will occur. [out] result Sets the result string to the value of the signal formatted as specified by the format_type. Providing a string of GEOPM_NAME_MAX length will be sufficient for storing any result.
- Returns
- Zero on success, error value on failure.
◆ geopm_pio_num_control_name()
| int geopm_pio_num_control_name | ( | void | ) |
- Returns
- the number of control names that can be indexed with the name_idx parameter to the geopm_pio_control_name() function. Any error in loading the platform will result in a negative error code describing the failure.
◆ geopm_pio_num_signal_name()
| int geopm_pio_num_signal_name | ( | void | ) |
- Returns
- the number of signal names that can be indexed with the name_idx parameter to the geopm_pio_signal_name() function. Any error in loading the platform will result in a negative error code describing the failure.
◆ geopm_pio_push_control()
| int geopm_pio_push_control | ( | const char * | control_name, |
| int | domain_type, | ||
| int | domain_idx | ||
| ) |
Push a control onto the stack of batch access controls. The control is defined by selecting a control_name from one of the values returned by the geopm_pio_control_name() function, the domain_type from one of the geopm_domain_e values, and the domain_idx between zero to the value returned by geopm_topo_num_domain(domain_type).
Subsequent calls to the geopm_pio_write_batch() function access the control values in the internal state and write the values to the hardware. All controls must be pushed onto the stack prior to the first call to geopm_pio_adjust() or geopm_pio_read_batch(). After calls to geopm_pio_adjust() or geopm_pio_read_batch() have been made, controls may be pushed again only after performing a reset by calling geopm_pio_reset() and before calling geopm_pio_adjust() or geopm_pio_read_batch() again. Attempts to push a control onto the stack after the first call to geopm_pio_adjust() or geopm_pio_read_batch() (and without performing a reset) or attempts to push a control_name that is not a value provided by geopm_pio_control_name() will result in a negative return value.
- Parameters
-
[in] control_name The name of the control, coming from the geopm_pio_control_name() function. [in] domain_type The type of the domain from one of the geopm_domain_e values [in] domain_idx between zero to the value returned by geopm_topo_num_domain(domain_type)
- Returns
- The return value of geopm_pio_push_control() can be passed to the geopm_pio_adjust() function which will update the internal state used to store batch controls. A distinct control index will be returned for each unique combination of input parameters.
◆ geopm_pio_push_signal()
| int geopm_pio_push_signal | ( | const char * | signal_name, |
| int | domain_type, | ||
| int | domain_idx | ||
| ) |
Push a signal onto the stack of batch access signals. The signal is defined by selecting a signal_name from one of the values returned by the geopm_pio_signal_name() function, the domain_type from one of the geopm_domain_e values, and the domain_idx between zero to the value returned by geopm_topo_num_domain(domain_type).
Subsequent calls to the geopm_pio_read_batch() function will read the signal and update the internal state used to store batch signals. All signals must be pushed onto the stack prior to the first call to geopm_pio_read_batch() or geopm_pio_adjust(). After calls to geopm_pio_read_batch() or geopm_pio_adjust() have been made, signals may be pushed again only after performing a reset by calling geopm_pio_reset() and before calling geopm_pio_read_batch() or geopm_pio_adjust() again. Attempts to push a signal onto the stack after the first call to geopm_pio_read_batch() or geopm_pio_adjust() (and without performing a reset) or attempts to push a signal_name that is not a value provided by geopm_pio_signal_name() will result in a negative return value.
- Parameters
-
[in] signal_name The name of the signal, coming from the geopm_pio_signal_name() function. [in] domain_type The type of the domain from one of the geopm_domain_e values [in] domain_idx between zero to the value returned by geopm_topo_num_domain(domain_type)
- Returns
- The return value of geopm_pio_push_signal() is an index that can be passed as the sample_idx parameter to geopm_pio_sample() to access the signal value stored in the internal state from the last update. A distinct signal index will be returned for each unique combination of input parameters.
◆ geopm_pio_read_batch()
| int geopm_pio_read_batch | ( | void | ) |
Read all push signals from the platform so that the next call to geopm_pio_sample() will reflect the updated data.
- Returns
- If an error occurs then negative error code is returned. Zero is returned upon success.
◆ geopm_pio_read_signal()
| int geopm_pio_read_signal | ( | const char * | signal_name, |
| int | domain_type, | ||
| int | domain_idx, | ||
| double * | result | ||
| ) |
Read from the platform and interpret into SI units a signal associated with signal_name and store the value in result. This value is read from the geopm_topo_e domain_type domain indexed by domain_idx.
- Parameters
-
[in] signal_name A string holding the name of the signal. [in] doman_type If the signal is native to a domain contained within domain_type, the values from the contained domains are aggregated to form result. [in] domain_idx Index into the geopm_topo_e domain_type domain. [out] result The value of the signal.
Calling this function does not modify values stored by calling geopm_pio_read_batch().
- Returns
- If an error occurs then negative error code is returned. Zero is returned upon success.
◆ geopm_pio_reset()
| void geopm_pio_reset | ( | void | ) |
Reset the GEOPM platform interface causing resources to be freed. This will cause the internal PlatormIO instance to be released/deleted and reconstructed. As a result, any signals and controls that had been pushed will be cleared, any batch servers that had been started will be stopped, and all registered IOGroups will be reset.
NOTE: the reset only applies to the Service PlatformIO instance and does not affect the PlatformIO instance managed by the GEOPM HPC runtime.
◆ geopm_pio_restore_control()
| int geopm_pio_restore_control | ( | void | ) |
Restore the state recorded by the last call to geopm_pio_save_control() so that all subsequent changes made through geopm_pio_write_control or geopm_pio_write_batch() are reverted to their previous settings.
- Returns
- If an error occurs then negative error code is returned. Zero is returned upon success.
◆ geopm_pio_restore_control_dir()
| int geopm_pio_restore_control_dir | ( | const char * | save_dir | ) |
Restore the state recorded by the last call to geopm_pio_save_control() in the directory so that all subsequent changes made through geopm_pio_write_control or geopm_pio_write_batch() are reverted to their previous settings.
- Parameters
-
[in] save_dir The directory where to restore the controls.
- Returns
- If an error occurs then negative error code is returned. Zero is returned upon success.
◆ geopm_pio_sample()
| int geopm_pio_sample | ( | int | signal_idx, |
| double * | result | ||
| ) |
Samples cached value of a single signal that has been pushed via geopm_pio_push_signal() and writes the value into result.
The cached value is updated at the time of call to geopm_pio_read_batch().
- Parameters
-
[in] signal_idx The signal_idx provided matches the return value from geopm_pio_push_signal() when the signal was pushed. [out] result The value of the signal.
- Returns
- If an error occurs then negative error code is returned. Zero is returned upon success.
◆ geopm_pio_save_control()
| int geopm_pio_save_control | ( | void | ) |
Save the state of all controls so that any subsequent changes made through geopm_pio_write_control() or geopm_pio_write_batch() may be reverted with a call to geopm_pio_restore_control().
The control settings are stored in memory managed by GEOPM.
- Returns
- If an error occurs then negative error code is returned. Zero is returned upon success.
◆ geopm_pio_save_control_dir()
| int geopm_pio_save_control_dir | ( | const char * | save_dir | ) |
Save the state of all controls in the directory so that any subsequent changes made through geopm_pio_write_control() or geopm_pio_write_batch() may be reverted with a call to geopm_pio_restore_control().
The control settings are stored in memory managed by GEOPM.
- Parameters
-
[in] save_dir The directory where to save the controls.
- Returns
- If an error occurs then negative error code is returned. Zero is returned upon success.
◆ geopm_pio_signal_description()
| int geopm_pio_signal_description | ( | const char * | signal_name, |
| size_t | description_max, | ||
| char * | description | ||
| ) |
- Parameters
-
[in] signal_name A string holding the name of the signal. [in] description_max At most description_max bytes are written to the description string. If description_max is too small to contain the description an error will occur. [out] description Sets the description string to the signal description associated with signal_name. Providing a string of GEOPM_NAME_MAX length will be sufficient for storing any description.
- Returns
- Zero is returned on success and a negative error code is returned if any error occurs.
◆ geopm_pio_signal_domain_type()
| int geopm_pio_signal_domain_type | ( | const char * | signal_name | ) |
Query the domain for the signal with name signal_name.
- Parameters
-
[in] signal_name A string holding the name of the signal.
- Returns
- one of the geopm_domain_e values signifying the granularity at which the signal is measured. Will return a negative error code if any error occurs, e.g. a request for a signal_name that is not supported by the platform.
◆ geopm_pio_signal_info()
| int geopm_pio_signal_info | ( | const char * | signal_name, |
| int * | aggregation_type, | ||
| int * | format_type, | ||
| int * | behavior_type | ||
| ) |
C interface to get enums associated with a signal name.
This interface supports DBus PlatformGetSignalInfo method. This C interface is implemented using several PlatformIO methods unlike the other wrappers in this header.
- Parameters
-
[in] signal_name Name of signal to query. [out] aggregation_type One of the Agg::m_type_e enum values describing the way the signal is aggregated. [out] format_type One of the geopm::string_format_e enums defined in Helper.hpp that defines how to format the signal as a string. [out] behavior_type One of the IOGroup::m_signal_behavior_e enum values that describes the signals behavior over time.
- Returns
- Zero on success, error value on failure.
◆ geopm_pio_signal_name()
| int geopm_pio_signal_name | ( | int | name_idx, |
| size_t | result_max, | ||
| char * | result | ||
| ) |
- Parameters
-
[in] name_idx The value of name_idx must be greater than zero and less than the return value from geopm_pio_num_signal_name() or else an error will occur. [in] result_max At most result_max bytes are written to the result string. If result_max is too small to contain the signal name an error will occur. [out] result Sets the result string to the name of the signal indexed by name_idx. Providing a string of GEOPM_NAME_MAX length will be sufficient for storing any result.
- Returns
- Zero is returned on success and a negative error code is returned if any error occurs.
◆ geopm_pio_start_batch_server()
| int geopm_pio_start_batch_server | ( | int | client_pid, |
| int | num_signal, | ||
| const struct geopm_request_s * | signal_config, | ||
| int | num_control, | ||
| const struct geopm_request_s * | control_config, | ||
| int * | server_pid, | ||
| int | key_size, | ||
| char * | server_key | ||
| ) |
Creates a batch server with the following signals and controls. It would be an error to create a batch server without any signals or controls.
- Parameters
-
[in] client_pid The PID of the client process to create the batch server with. [in] num_signal The number of elements in the array signal_config. [in] signal_config An array of geopm_request_s elements, each containing the name of the signal, the domain, and the domain index. [in] num_control The number of elements in the array control_config. [in] control_config An array of geopm_request_s elements, each containing the name of the control, the domain, and the domain index. [out] server_pid The PID of the created batch server. [in] key_size The length of the server_key string. If key_size is too small to contain the server_key an error will occur. [out] server_key The key used to identify the server connection: a substring in interprocess shared memory keys used for communication. Providing a string of GEOPM_NAME_MAX length will be sufficient for storing any server_key.
- Returns
- Zero is returned on success and a negative error code is returned if any error occurs.
◆ geopm_pio_stop_batch_server()
| int geopm_pio_stop_batch_server | ( | int | server_pid | ) |
Supports the D-Bus interface for stopping a batch server. Call through to BatchServer::stop_batch()
This function is called directly by geopmd in order to end a batch session and kill the batch server process created by start_batch_server().
- Parameters
-
server_pid The batch server PID to stop, it tries to find it. If the PID is not found, it is an error.
- Returns
- Zero is returned on success and a negative error code is returned if any error occurs.
◆ geopm_pio_write_batch()
| int geopm_pio_write_batch | ( | void | ) |
Write all pushed controls so that values provided to geopm_pio_adjust() are written to the platform.
- Returns
- If an error occurs then negative error code is returned. Zero is returned upon success.
◆ geopm_pio_write_control()
| int geopm_pio_write_control | ( | const char * | control_name, |
| int | domain_type, | ||
| int | domain_idx, | ||
| double | setting | ||
| ) |
Interpret the setting in SI units associated with control_name and write it to the platform. This value is written to the geopm_topo_e domain_type domain indexed by domain_idx.
- Parameters
-
[in] control_name A string holding the name of the control. [in] doman_type If the control is native to a domain contained within domain_type, then the setting is written to all contained domains. [in] domain_idx Index into the geopm_topo_e domain_type domain. [out] setting The setting in SI units associated with control_name.
Calling this function does not modify values stored by calling geopm_pio_adjust().
- Returns
- If an error occurs then negative error code is returned. Zero is returned upon success.